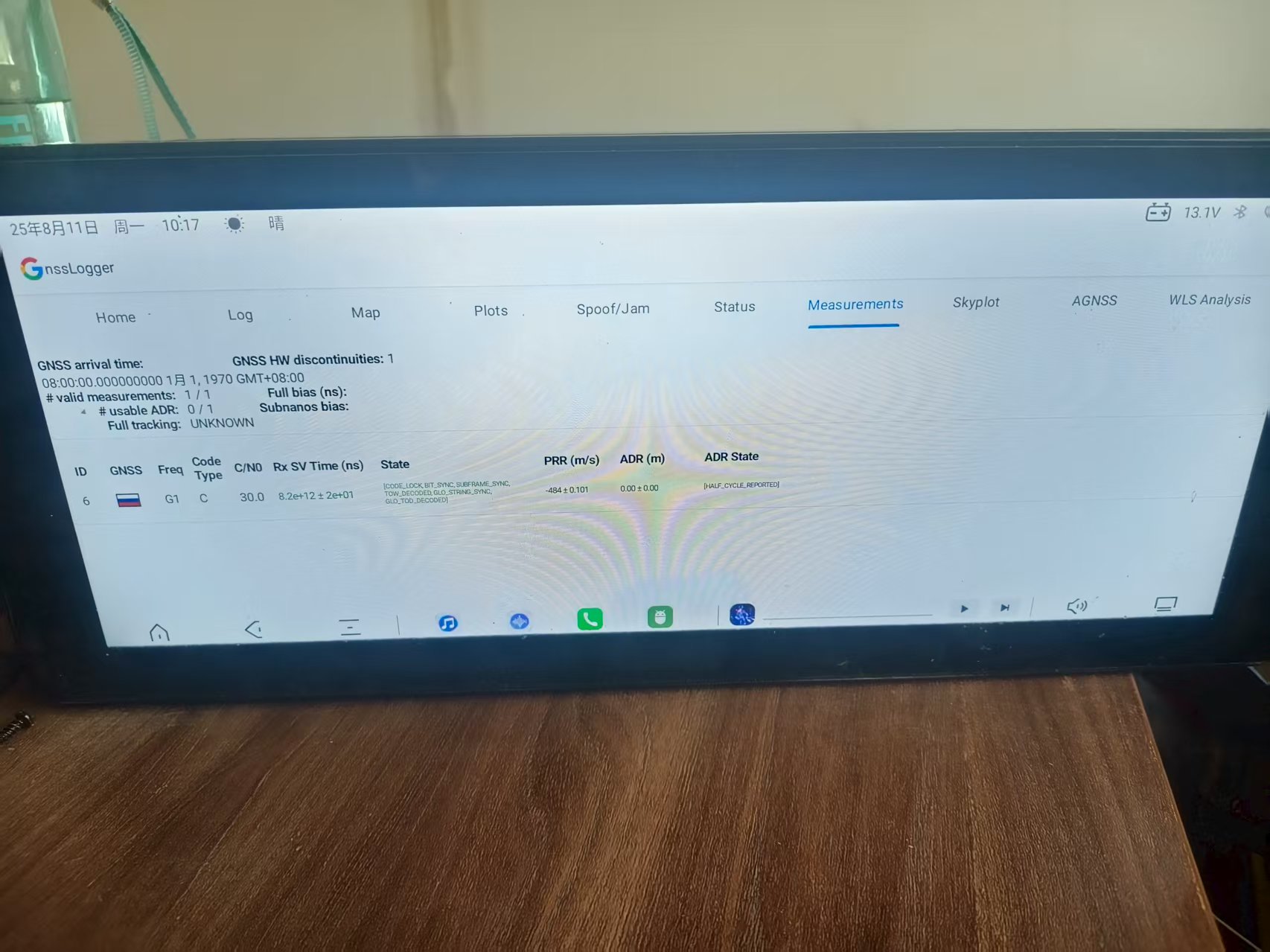
现在安卓系统除了用nmea定位外,还支持原始观测量和导航电文,原始观测量里用载波相位,硬件时间,gps时间,卫星信号发射时间,钟差,伪距,瞬时多普勒等信息填充。导航电文采用未解算的导航电文填充,下面是头文件中的字段说明,/**
- Represents a GNSS Measurement, it contains raw and computed information.
- Independence - All signal measurement information (e.g. sv_time,
- pseudorange_rate, multipath_indicator) reported in this struct should be
- based on GNSS signal measurements only. You may not synthesize measurements
- by calculating or reporting expected measurements based on known or estimated
- position, velocity, or time.
/
typedef struct {
/* set to sizeof(GpsMeasurement) /
size_t size;
/* A set of flags indicating the validity of the fields in this data structure. /
GnssMeasurementFlags flags;
/*- Satellite vehicle ID number, as defined in GnssSvInfo::svid
- This is a mandatory value.
/
int16_t svid;
/* - Defines the constellation of the given SV. Value should be one of those
- GNSS_CONSTELLATION_* constants
/
GnssConstellationType constellation;
/* - Time offset at which the measurement was taken in nanoseconds.
- The reference receiver’s time is specified by GpsData:
 :time_ns and should be
:time_ns and should be - interpreted in the same way as indicated by GpsClock::type.
- The sign of time_offset_ns is given by the following equation:
-
measurement time = GpsClock::time_ns + time_offset_ns - It provides an individual time-stamp for the measurement, and allows sub-nanosecond accuracy.
- This is a mandatory value.
/
double time_offset_ns;
/* - Per satellite sync state. It represents the current sync state for the associated satellite.
- Based on the sync state, the ‘received GPS tow’ field should be interpreted accordingly.
- This is a mandatory value.
/
GnssMeasurementState state;
/* - The received GNSS Time-of-Week at the measurement time, in nanoseconds.
- Ensure that this field is independent (see comment at top of
- GnssMeasurement struct.)
- For GPS & QZSS, this is:
- Received GPS Time-of-Week at the measurement time, in nanoseconds.
- The value is relative to the beginning of the current GPS week.
- Given the highest sync state that can be achieved, per each satellite, valid range
- for this field can be:
-
Searching : [ 0 ] : GNSS_MEASUREMENT_STATE_UNKNOWN -
C/A code lock : [ 0 1ms ] : GNSS_MEASUREMENT_STATE_CODE_LOCK is set -
Bit sync : [ 0 20ms ] : GNSS_MEASUREMENT_STATE_BIT_SYNC is set -
Subframe sync : [ 0 6s ] : GNSS_MEASUREMENT_STATE_SUBFRAME_SYNC is set -
TOW decoded : [ 0 1week ] : GNSS_MEASUREMENT_STATE_TOW_DECODED is set - Note well: if there is any ambiguity in integer millisecond,
- GNSS_MEASUREMENT_STATE_MSEC_AMBIGUOUS should be set accordingly, in the ‘state’ field.
- This value must be populated if ‘state’ != GNSS_MEASUREMENT_STATE_UNKNOWN.
- For Glonass, this is:
- Received Glonass time of day, at the measurement time in nanoseconds.
- Given the highest sync state that can be achieved, per each satellite, valid range for
- this field can be:
-
Searching : [ 0 ] : GNSS_MEASUREMENT_STATE_UNKNOWN -
C/A code lock : [ 0 1ms ] : GNSS_MEASUREMENT_STATE_CODE_LOCK is set -
Symbol sync : [ 0 10ms ] : GNSS_MEASUREMENT_STATE_SYMBOL_SYNC is set -
Bit sync : [ 0 20ms ] : GNSS_MEASUREMENT_STATE_BIT_SYNC is set -
String sync : [ 0 2s ] : GNSS_MEASUREMENT_STATE_GLO_STRING_SYNC is set -
Time of day : [ 0 1day ] : GNSS_MEASUREMENT_STATE_GLO_TOD_DECODED is set - For Beidou, this is:
- Received Beidou time of week, at the measurement time in nanoseconds.
- Given the highest sync state that can be achieved, per each satellite, valid range for
- this field can be:
-
Searching : [ 0 ] : GNSS_MEASUREMENT_STATE_UNKNOWN -
C/A code lock: [ 0 1ms ] : GNSS_MEASUREMENT_STATE_CODE_LOCK is set -
Bit sync (D2): [ 0 2ms ] : GNSS_MEASUREMENT_STATE_BDS_D2_BIT_SYNC is set -
Bit sync (D1): [ 0 20ms ] : GNSS_MEASUREMENT_STATE_BIT_SYNC is set -
Subframe (D2): [ 0 0.6s ] : GNSS_MEASUREMENT_STATE_BDS_D2_SUBFRAME_SYNC is set -
Subframe (D1): [ 0 6s ] : GNSS_MEASUREMENT_STATE_SUBFRAME_SYNC is set -
Time of week : [ 0 1week ] : GNSS_MEASUREMENT_STATE_TOW_DECODED is set - For Galileo, this is:
- Received Galileo time of week, at the measurement time in nanoseconds.
-
E1BC code lock : [ 0 4ms ] : GNSS_MEASUREMENT_STATE_GAL_E1BC_CODE_LOCK is set -
E1C 2nd code lock: [ 0 100ms ] : -
GNSS_MEASUREMENT_STATE_GAL_E1C_2ND_CODE_LOCK is set -
E1B page : [ 0 2s ] : GNSS_MEASUREMENT_STATE_GAL_E1B_PAGE_SYNC is set -
Time of week: [ 0 1week ] : GNSS_MEASUREMENT_STATE_TOW_DECODED is set - For SBAS, this is:
- Received SBAS time, at the measurement time in nanoseconds.
- Given the highest sync state that can be achieved, per each satellite,
- valid range for this field can be:
-
Searching : [ 0 ] : GNSS_MEASUREMENT_STATE_UNKNOWN -
C/A code lock: [ 0 1ms ] : GNSS_MEASUREMENT_STATE_CODE_LOCK is set -
Symbol sync : [ 0 2ms ] : GNSS_MEASUREMENT_STATE_SYMBOL_SYNC is set -
Message : [ 0 1s ] : GNSS_MEASUREMENT_STATE_SBAS_SYNC is set
int64_t received_sv_time_in_ns;
/*- 1-Sigma uncertainty of the Received GPS Time-of-Week in nanoseconds.
- This value must be populated if ‘state’ != GPS_MEASUREMENT_STATE_UNKNOWN.
/
int64_t received_sv_time_uncertainty_in_ns;
/* - Carrier-to-noise density in dB-Hz, typically in the range [0, 63].
- It contains the measured C/N0 value for the signal at the antenna port.
- This is a mandatory value.
/
double c_n0_dbhz;
/* - Pseudorange rate at the timestamp in m/s. The correction of a given
- Pseudorange Rate value includes corrections for receiver and satellite
- clock frequency errors. Ensure that this field is independent (see
- comment at top of GnssMeasurement struct.)
- It is mandatory to provide the ‘uncorrected’ ‘pseudorange rate’, and provide GpsClock’s
- ‘drift’ field as well (When providing the uncorrected pseudorange rate, do not apply the
- corrections described above.)
- The value includes the ‘pseudorange rate uncertainty’ in it.
- A positive ‘uncorrected’ value indicates that the SV is moving away from the receiver.
- The sign of the ‘uncorrected’ ‘pseudorange rate’ and its relation to the sign of 'doppler
- shift’ is given by the equation:
-
pseudorange rate = -k * doppler shift (where k is a constant) - This should be the most accurate pseudorange rate available, based on
- fresh signal measurements from this channel.
- It is mandatory that this value be provided at typical carrier phase PRR
- quality (few cm/sec per second of uncertainty, or better) - when signals
- are sufficiently strong & stable, e.g. signals from a GPS simulator at >=
- 35 dB-Hz.
/
double pseudorange_rate_mps;
/* - 1-Sigma uncertainty of the pseudorange_rate_mps.
- The uncertainty is represented as an absolute (single sided) value.
- This is a mandatory value.
/
double pseudorange_rate_uncertainty_mps;
/* - Accumulated delta range’s state. It indicates whether ADR is reset or there is a cycle slip
- (indicating loss of lock).
- This is a mandatory value.
/
GnssAccumulatedDeltaRangeState accumulated_delta_range_state;
/* - Accumulated delta range since the last channel reset in meters.
- A positive value indicates that the SV is moving away from the receiver.
- The sign of the ‘accumulated delta range’ and its relation to the sign of ‘carrier phase’
- is given by the equation:
-
accumulated delta range = -k * carrier phase (where k is a constant) - This value must be populated if ‘accumulated delta range state’ != GPS_ADR_STATE_UNKNOWN.
- However, it is expected that the data is only accurate when:
-
'accumulated delta range state' == GPS_ADR_STATE_VALID.
double accumulated_delta_range_m;
/*- 1-Sigma uncertainty of the accumulated delta range in meters.
- This value must be populated if ‘accumulated delta range state’ != GPS_ADR_STATE_UNKNOWN.
/
double accumulated_delta_range_uncertainty_m;
/* - Carrier frequency at which codes and messages are modulated, it can be L1 or L2.
- If the field is not set, the carrier frequency is assumed to be L1.
- If the data is available, ‘flags’ must contain
- GNSS_MEASUREMENT_HAS_CARRIER_FREQUENCY.
/
float carrier_frequency_hz;
/* - The number of full carrier cycles between the satellite and the receiver.
- The reference frequency is given by the field ‘carrier_frequency_hz’.
- Indications of possible cycle slips and resets in the accumulation of
- this value can be inferred from the accumulated_delta_range_state flags.
- If the data is available, ‘flags’ must contain
- GNSS_MEASUREMENT_HAS_CARRIER_CYCLES.
/
int64_t carrier_cycles;
/* - The RF phase detected by the receiver, in the range [0.0, 1.0].
- This is usually the fractional part of the complete carrier phase measurement.
- The reference frequency is given by the field ‘carrier_frequency_hz’.
- The value contains the ‘carrier-phase uncertainty’ in it.
- If the data is available, ‘flags’ must contain
- GNSS_MEASUREMENT_HAS_CARRIER_PHASE.
/
double carrier_phase;
/* - 1-Sigma uncertainty of the carrier-phase.
- If the data is available, ‘flags’ must contain
- GNSS_MEASUREMENT_HAS_CARRIER_PHASE_UNCERTAINTY.
/
double carrier_phase_uncertainty;
/* - An enumeration that indicates the ‘multipath’ state of the event.
- The multipath Indicator is intended to report the presence of overlapping
- signals that manifest as distorted correlation peaks.
-
- if there is a distorted correlation peak shape, report that multipath
- is GNSS_MULTIPATH_INDICATOR_PRESENT.
-
- if there is not a distorted correlation peak shape, report
- GNSS_MULTIPATH_INDICATOR_NOT_PRESENT
-
- if signals are too weak to discern this information, report
- GNSS_MULTIPATH_INDICATOR_UNKNOWN
- Example: when doing the standardized overlapping Multipath Performance
- test (3GPP TS 34.171) the Multipath indicator should report
- GNSS_MULTIPATH_INDICATOR_PRESENT for those signals that are tracked, and
- contain multipath, and GNSS_MULTIPATH_INDICATOR_NOT_PRESENT for those
- signals that are tracked and do not contain multipath.
/
GnssMultipathIndicator multipath_indicator;
/* - Signal-to-noise ratio at correlator output in dB.
- If the data is available, ‘flags’ must contain GNSS_MEASUREMENT_HAS_SNR.
- This is the power ratio of the "correlation peak height above the
- observed noise floor" to “the noise RMS”.
/
double snr_db;
} GnssMeasurement;这是原始观测量,下面是导航电文/* Represents a GPS navigation message (or a fragment of it). /
typedef struct {
/* set to sizeof(GnssNavigationMessage) /
size_t size;
/* - Satellite vehicle ID number, as defined in GnssSvInfo::svid
- This is a mandatory value.
/
int16_t svid;
/* - The type of message contained in the structure.
- This is a mandatory value.
/
GnssNavigationMessageType type;
/* - The status of the received navigation message.
- No need to send any navigation message that contains words with parity error and cannot be
- corrected.
/
NavigationMessageStatus status;
/* - Message identifier. It provides an index so the complete Navigation
- Message can be assembled.
-
- For GPS L1 C/A subframe 4 and 5, this value corresponds to the 'frame
- id’ of the navigation message, in the range of 1-25 (Subframe 1, 2, 3
- does not contain a ‘frame id’ and this value can be set to -1.)
-
- For Glonass L1 C/A, this refers to the frame ID, in the range of 1-5.
-
- For BeiDou D1, this refers to the frame number in the range of 1-24
-
- For Beidou D2, this refers to the frame number, in the range of 1-120
-
- For Galileo F/NAV nominal frame structure, this refers to the subframe
- number, in the range of 1-12
-
- For Galileo I/NAV nominal frame structure, this refers to the subframe
- number in the range of 1-24
/
int16_t message_id;
/* - Sub-message identifier. If required by the message ‘type’, this value
- contains a sub-index within the current message (or frame) that is being
- transmitted.
-
- For GPS L1 C/A, BeiDou D1 & BeiDou D2, the submessage id corresponds to
- the subframe number of the navigation message, in the range of 1-5.
-
- For Glonass L1 C/A, this refers to the String number, in the range from
- 1-15
-
- For Galileo F/NAV, this refers to the page type in the range 1-6
-
- For Galileo I/NAV, this refers to the word type in the range 1-10+
/
int16_t submessage_id;
/*
- For Galileo I/NAV, this refers to the word type in the range 1-10+
- The length of the data (in bytes) contained in the current message.
- If this value is different from zero, ‘data’ must point to an array of the same size.
- e.g. for L1 C/A the size of the sub-frame will be 40 bytes (10 words, 30 bits/word).
- This is a mandatory value.
/
size_t data_length;
/* - The data of the reported GPS message. The bytes (or words) specified
- using big endian format (MSB first).
-
- For GPS L1 C/A, Beidou D1 & Beidou D2, each subframe contains 10 30-bit
- words. Each word (30 bits) should be fit into the last 30 bits in a
- 4-byte word (skip B31 and B32), with MSB first, for a total of 40
- bytes, covering a time period of 6, 6, and 0.6 seconds, respectively.
-
- For Glonass L1 C/A, each string contains 85 data bits, including the
- checksum. These bits should be fit into 11 bytes, with MSB first (skip
- B86-B88), covering a time period of 2 seconds.
-
- For Galileo F/NAV, each word consists of 238-bit (sync & tail symbols
- excluded). Each word should be fit into 30-bytes, with MSB first (skip
- B239, B240), covering a time period of 10 seconds.
-
- For Galileo I/NAV, each page contains 2 page parts, even and odd, with
- a total of 2x114 = 228 bits, (sync & tail excluded) that should be fit
- into 29 bytes, with MSB first (skip B229-B232).
/
uint8_t data;
} GnssNavigationMessage; 然后我想问的是咱们的LC29H模块有办法输出这些需要的信息吗?哪怕是间接的也可以,可以在驱动中去做一些计算来达到安卓系统的要求,现在很多地图都需要安卓系统的这两个接口来实现车道及导航,高德地图可以直接用nmea实现车道级导航,但是百度地图就依赖这里两个接口实现